
Řídicí jednotky komerčních hračkových dronů jsou principiálně stejné – procesor, čidla, rádio a ovládání motorů. Dron z Lidlu má rádio a procesor na jednom čipu, drony Syma mají rádio zvlášť. Kamera je vždy samostatně. Někdy je připojena sériovou linkou (Syma X8PRO, Syma Z4W) jindy vodičem pro přenos povelů formou impulzů, které se liší délkou (Syma X5C – krátký impulz fotka, dlouhý impulz video).
Srdcem každé řídicí jednotky je mikrokontrolér. Používají se výhradně procesoru rodiny ARM ať už jako čínské klony řady STM32, Nuvoton nebo integrované v čipu s rádiem. Frekvence maximálně 100MHz.
Připojení. Není to WIFI, i když je to stejná frekvence 2.4GHz. Dosah okolo 100m v závislosti na anténě a výkonu. Pokud se dron ovládá i přes WIFI, je to přes modul kamery, která WIFI používá. Popis komunikace někdy příště. Na straně ovladače i drona se používají čipy nRF24L01 nebo jejich čínská varianta BEKEN. S MCU komunikuje sběrnicí SPI.

Napájení
Napětí z baterie je přivedeno přímo spínací tranzistory motorů. Žádný vypínač, nic, kde by se mohl vytvořit úbytek, protože tam tečou velké proudy. To také znamená, že i když je vypínač vypnutý, silová část je pod napětím. Pokud by došlo k proražení tranzistoru, motor se bude točil naplno, vypínač zde nepomůže.
Za vypínač jsou připojeny 3 bloky: voltmetr, LED diody a měnič. Případně ještě kamera, která je jako samostatný modul.
Voltmetr je dělaný jako odporový dělič s vyhlazovacím kondenzátorem. Procesor sleduje napětí na baterii, aby mohl reagovat v případě, že je baterie vybitá. A/D převodníky mikrokontroléru mají referenční napětí nižší, než je napájecí, odhaduji 1.024V a proto je třeba měřené napětí snížit.
LED diody mají některé drony zapojené do jednom okruhu, některé do dvou. Spínání se provádí přes tranzistor, v tomto není žádná kreativita. Syma X5C má pro napájení LEDek stabilizátor 3V.
Měnič napětí zajišťuje, aby procesor, rádio a čidla měla stabilní napájecí napětí bez ohledu na stav baterie a aktuální zátěž od motorů. Jeho výstupem je stabilní napětí 3.3V. Syma X5C napětí z baterie (3.7V max) před stabilizací boost konvertorem zvyšuje.
Senzory
Čidla dělají rozdíly mezi drony a jejich funkcemi.
Akcelerometr a gyroskop má každý dron. Díky němu drží stabilizaci, bez akcelerometru to nejde. Zásadní však je dobrá kalibrace. Pokud je špatná kalibrace, dron unáší na stranu. Syma používá modul IMU-6050, Lidl něco neznámého, pravděpodobně je to kopie ICM42670.
Barometr slouží jako výškoměr. Díky němu dokáže dron držet stabilně výšku. Změny tlaku jsou malé a je opravdu velmi citlivý. Někdy v uzavřeném prostoru dron mění výšku podle toho, jak fouká vítr. Nelze to zazlívat ani dronu ani barometru, je to fyzika. Díky barometru, potažmo výškoměru může dron omezit maximální výšku, kam lze doletět. Úsměvný dopad této myšlenky se projeví při chůzi do kopce. Dron od určitého okamžiku začíná klesat a odmítá zdvihat výšku. Zdánlivě nesmyslně. Na vině je výškový limit od místa, které zůstalo za námi v údolí.
GPS modul je umístěn samostatně. Má velikou anténu a dodává se jako komponenta. K řídící jednotce se připojuje přes sériovou linku. Komunikace je standardní NMEA.
Ovládání motorů
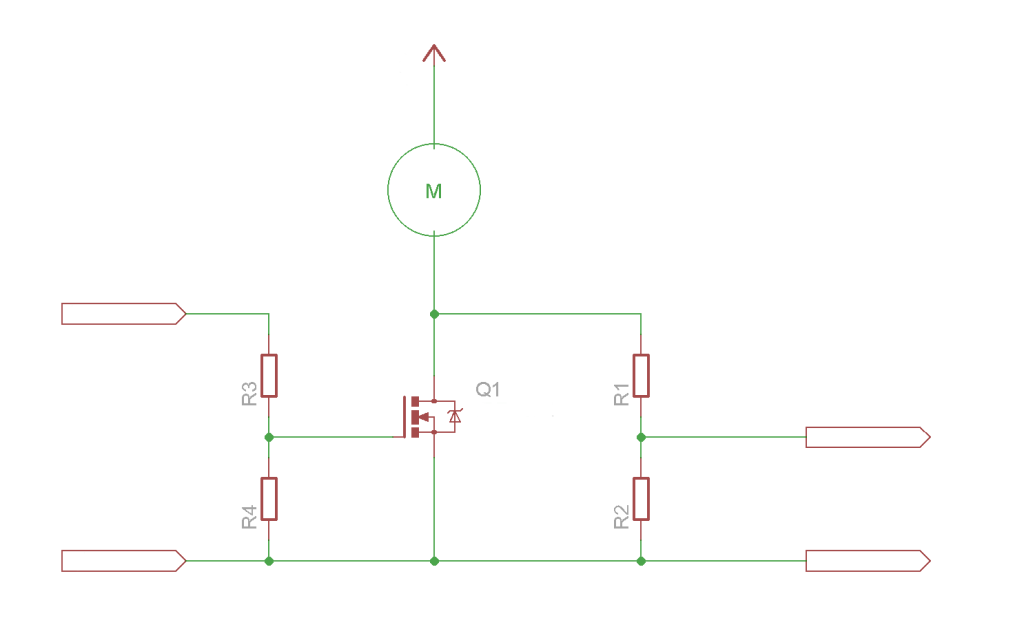
Hračkové drony používají kartáčové motory, které mají malou velikost, cenu, hmotnost a sílu. Ty se ve světě seriózních dronů prakticky nepoužívají, tam se používají bezkartáčové. Jsou připojené dvěma dráty a na jejich ovládání stačí jeden tranzistor typu N-MOSFET.
Drony mívají sledování proudu, který teče motorem, které ho má ochránit před spálením. Na Syma X8PRO to není nejdokonalejší. Motor jsem spálil při nárazu do větve. Sledování se provádí sledováním napětí na tranzistoru. Z úsporných důvodů zde není žádný proudový senzor ani v podobě rezistoru.
Závěr
Architektura ovládacích jednotek je u všech modelů prakticky stejná a v průběhu času se nemění. Jednotlivé modely se mezi sebou liší tím, jestli mají kompas nebo barometr nebo jak silné tranzistory použijí pro ovládání motorů.

Napsat komentář